Hexapod is a mechanical robot that walks on six legs.
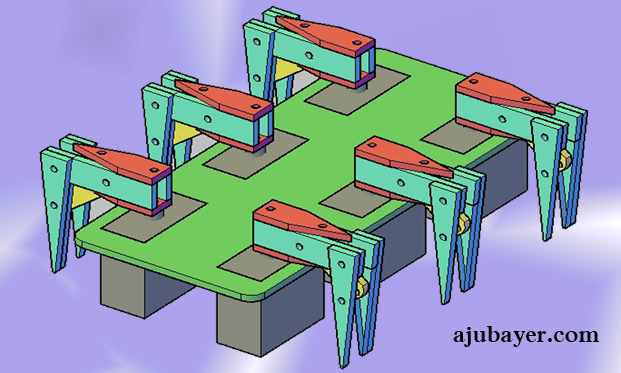
I finished the initial design and started constructing the mechanical parts. I will post the updates as I progress through the construction of my first hexapod. I provided some pictures to show how my hexapod will look like.
Right View:

Top View:

Left View:

What is the angle of freedom for the six base motors? also how many the degrees of freedom you have for each leg?
Front and back base servo motors will have 90 deg…middle ones will have 60 deg…I am planning on adding 6 more motors to lift the legs from the ground…adding little more dynamics to the robot. These motors will have 90 deg of freedom…well I think 90 deg is not necessary…so I will adjust it when I get to that point…